圆弧指令MOVC
机器人会通过以圆弧插补示教的三点画一个圆弧,然后在圆弧上移动
-
单个圆弧
当只有一个圆弧时,如下图那样用圆弧插补对P1~P3三点进行示教。
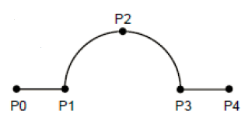
点 插补方式 指令 P0 关节或直线 ABSJ、MOVJ或MOVL P1 直线 MOVL P2 圆弧 MOVC P3 圆弧 MOVC P4 直线 MOVL -
整圆圆弧
当是整圆时,如下图那样用圆弧插补对P1~P4四点(或者更多点)进行示教。
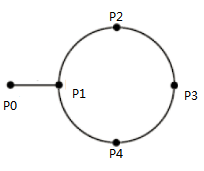
点 插补方式 指令 P0 关节或直线 ABSJ、MOVJ或MOVL P1 直线 MOVL P2 圆弧 MOVC P3 圆弧 MOVC P4 圆弧 MOVC P1 圆弧 MOVC P0 直线 MOVL -
连续圆弧
像下图那样,有两个以上曲率不同的圆弧相连时,必须在前后两个圆弧的连接点处的MOVC指令加入FPT参数,就如图中的P3那样。
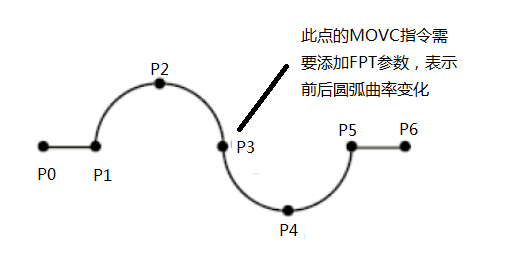
点 插补方式 指令 P0 关节或直线 ABSJ、MOVJ或MOVL P1 直线 MOVL P2 圆弧 MOVC P3 圆弧(改变曲率) MOVC FPT P4 圆弧 MOVC P5 圆弧 MOVC P6 直线 MOVL
如何提高运动节拍
码垛或者上下料应用,可以通过合理设置运动指令的 ZONE,实现节拍的最大化。
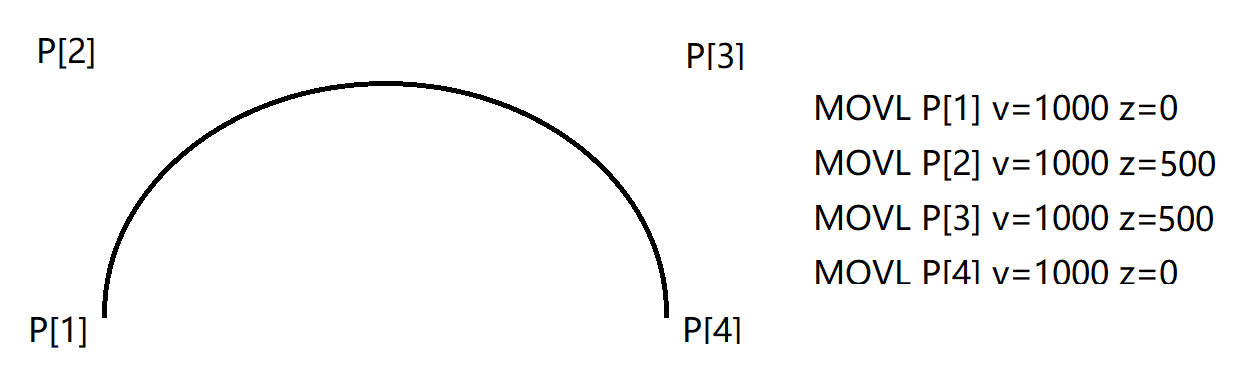
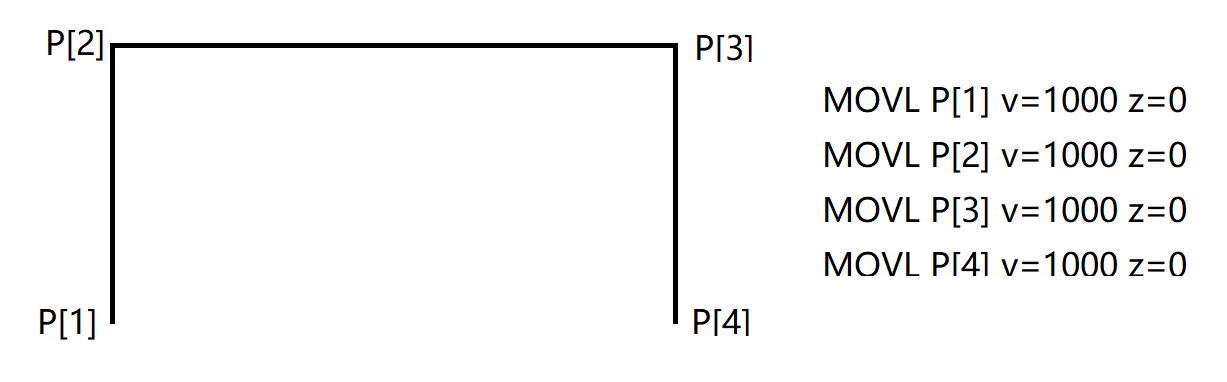
例如一个门型运动轨迹四个点 P[1]、P[2]、P[3]、P[4];其中 P[1]和 P[4]两个点在下 方,P[2]和 P[3]两个在上方;正向运动轨迹路径为 12,23,34;反向运动轨迹路径为 43, 32,21。如下图所示,左边是运动轨迹,右边是程序。所有指令的 zone 参数都是 0,此时程序 运动到每个目标点都会减速到 0,节拍很慢。
如果运动到P[1],P[2],P[3],P[4]的MOVL指令的zone都是200,则12与23各自取出200mm长度区域融合为类似圆弧的轨迹(如果200mm超过了12或者23轨迹长度的一半,则只会取12或者23轨迹长度一半做轨迹融合)。23与34轨迹融合也是类似情况。整个门型路径在P[2]和P[3]将会采用类似圆弧过渡。节拍可能比zone全部为0的情况提升50%左右。如下图所示,左边是运动轨迹,右边是程序。

如果运动到P[1]和P[4]的MOVL指令的zone为0,运动到P[2]和P[3]的MOVL指令的zone为超过门型高度的值,例如500mm的zone(zone的大小必须超过12或者34轨迹的长度,否则只会截取12或者34轨迹的一半区域做轨迹融合)。则12的全部轨迹与23前一半