产品
行业
服务与支持
开发者平台
关于牧非
使用牧非控制系统,构建快速、精准和动作流畅的工业机器人
运用先进控制技术帮助客户显著提升机器人性能,实现国产机器人替代FANUC、ABB等进口一线品牌产品
产品介绍
控制技术
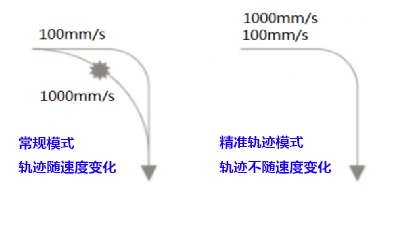
精准轨迹
融合轨迹不会随着速度改变而变化
惯量前馈技术确保机器人在任何速度下都可以沿着同样路径运动
编程调试在提速过程中,不会因为轨迹改变而反复修改程序,工程实施时间显著缩短
尤其适合于涂胶,切割等对轨迹精度有要求的应用场合
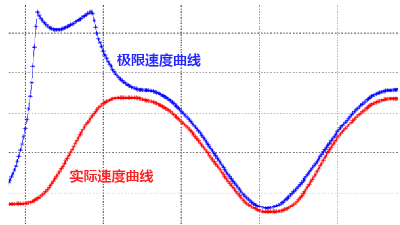
快速运动
基于动力学控制技术最大化发挥机器人本体性能
运动中同一时刻总有一个轴处在最大能力状态
动力学优化减小机器人本体在高速运动时候产生的抖动
根据机器人负载自动优化,实现机器人最快节拍的同时,不会导致机器人报警和停机
实现和FANUC、ABB等国际一线品牌同样的节拍和性能水平
传送带跟踪
同时支持最多4个传送带
专用传送带跟踪指令简化机器人编程复杂度
动态自适应跟踪技术有效提高跟踪精度
支持传送带不同位置点调试运动程序
通过补偿时间参数达到跟踪精度最优
改变传送带速度或机器人速度不需要重新标定跟踪参数